人と共生するロボット
人工筋肉で動くロボットアーム「ジャコメッテイアーム」
一般社団法人蔵前工業会(東京工業大学同窓会)は、時宜に適した技術テーマを取り上げて「蔵前科学技術セミナー」を主催しているが、10月21日(土)に開かれた第37回は「人とロボットの近未来」の特集をテーマとする講演会を開催した。
人工知能やICT(Information and Communication Technology=情報通信科学)が活躍する近未来の社会では人と共生するロボットがどのような仕組みや原理で成り立っているかについて開発に携わっている専門家が分かりやすく解説した。
面白かったのは「生体の動きをロボットで模倣する」と題した中島求東工大工学院システム制御系教授の「イルカ型ロボットの開発」。イルカ(全長3m)は最高時速30km(ちなみにマグロは100キロとも160キロとも言われている)なのに比べ、原子力潜水艦(旧ソ連製アルファ型スーパー原潜、全長80m)は80km。体長比で言えば、イルカのほうが原潜より10倍くらい速い。
しかもイルカは流れをかき乱さないのでエネルギーロスも少ないのではないか。ジャンプしたり、すばやく方向転換する能力は原潜には到底できない。イルカの動きは非常にすぐれたものだ。それを応用することによって、これまでにない人工物ができる。推進力の源泉が尾ひれだが、三日月の形状である理由がいまだ分かっていない。
一方、遠藤玄東工大工学院機械系教授はヘビ型ロボットの開発状況を明らかにしながら、「廃炉支援ロボット」について話した。タマゴヘビというウズラの卵のみを餌にしている珍しいヘビ。丸ごと卵を飲み込んで殻だけを吐き出す特徴があり、つぶらな瞳はヘビ愛好家に人気。飼育日記をブログに公開している人もいるくらいだ。
このタマゴヘビは構造としては極めて単純ながら、多様な機能を持っている。日本固有種の無毒のシマヘビを油を撒いた床に置くと、アコーディオン式滑走をする。「くねり」を含め、蛇行推進など環境によってどういう動きをすればいいのかをヘビは考える。
我々は、ヘビのこうした動きを工学的に考えようとした。蛇行で進むメカニズムは水陸両用にも使える。2004年に東工大発ベンチャー「ハイボット」を立ち上げた。継続開発を進め、清水建設と共同で実用化。東京電力福島第1原発1号炉の検査に投入された。
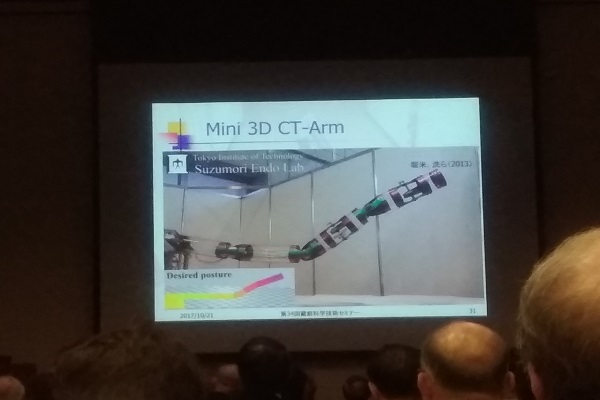
ヘビを「アーム(腕)」として使用することも考えている。原子炉のデブリを取り出すために核燃料だけでなく、構造体もろとも溶けている。大変な状況で、誰も取り出し方が分からない。どこにありそうだということが最近になって分かり始めたのが現状。見にいくために長いアームを差し込む必要性があると研究を始めた。
2012年直後から、そうした長いアームを入れて中をみたらどうかというコンセプトを提案。長いアームを実現しようと思うと、片持ちになるので、非常に大きなモーメントが手元に働く。どれだけ大きなモーメントを支えるかが重要な課題。それを解決し、放射線に強いアームを完成した。
質疑応答で会場から何ができたら廃炉という開発目標を達成したと言えるのかについて質問があった。遠藤教授は、最初の工程表では「燃料デブリの取り出し方法を決めたい。そのためにはどこにあってどんな状態なのかを知りたい」だったが、「今も見つかっていないのが現状で、後ろ倒しになっている」と説明。「見つかってから技術開発をやらなければならない」とし、どんな状態であるかが分かった段階でも成果かなと思うと述べた。
「3号機で水の中にデブリがある写真が初めて撮れた。2号機はどこにあるか分からない。1号機はちょっとだけ写ったかなという感じだ。正直どこまで進んだら終わるのかは分かっていない」と述べた。
事故発生時には廃炉には30年から40年はかかると言われたが、今はあれから6年半経過している。今聞かれたら、本当なら24年から34年に終わると言わなければならないが、まだ「30年から40年」と言っている。これがどこまで続くか分からない。なるべく早く頑張るしかないと答えた。